By default, the SMURF makemap command identifies and removes a single correlated background signal – called the common-mode – from all bolometer time-streams. However, in some cases there is clear evidence that there is more than one correlated background signal present in the bolometer time streams. This is particularly evident in POL2 data, where the varying instrumental polarisation causes different parts of the focal plane to see different levels of sky polarisation. For POL2, better maps are created if multiple correlated background signals are identified and removed . This is achieved within makemap using a process called Principal Component Analysis (PCA). The down side to using PCA is that it is very very slow – it is just about practical in the case of POL2 data because of the very low scan speed and consequent very low sample rate.
A change introduced into SMURF on 1st April 2019 should speed up PCA by a factor of 2 or 3, making POL2 reductions quicker and maybe making PCA background removal practical for non-POL2 data. Maps created using the new PCA system will not be identical to maps made with the old system, but the differences should be well within the noise levels (the pixel variances remain largely unaffected).
To use PCA within a normal run of makemap it is recommended to add the following to your config file:
modelorder = (com,gai,pca,ext,flt,ast,noi)
pca.pcathresh = -50
It is usually a good idea to mask out the source when calculating the PCA model on the first few iterations, since this seems to aid convergence. The same sort of mask should be used with PCA as is used with AST, but it should only be applied for a few iterations. So for instance for a point source you could add:
pca.zero_circle = 0.01667
pca.zero_niter = 2
This masks the PCA model on the first two iterations using a circle of radius 60 arc-seconds (0.01667 degrees).
Using PCA usually causes makemap to converge more slowly, but often produces maps with lower levels of artificial structures. If pca.pcathresh is negative, the absolute value indicates the number of correlated signals to remove as the background in each bolometer. Smaller numbers result in a lower level of noise reduction in the final map, but faster convergence. Larger numbers result in a higher level of noise reduction in the final map, but slower convergence. The default value is 50, which usually seems to be a reasonable compromise.
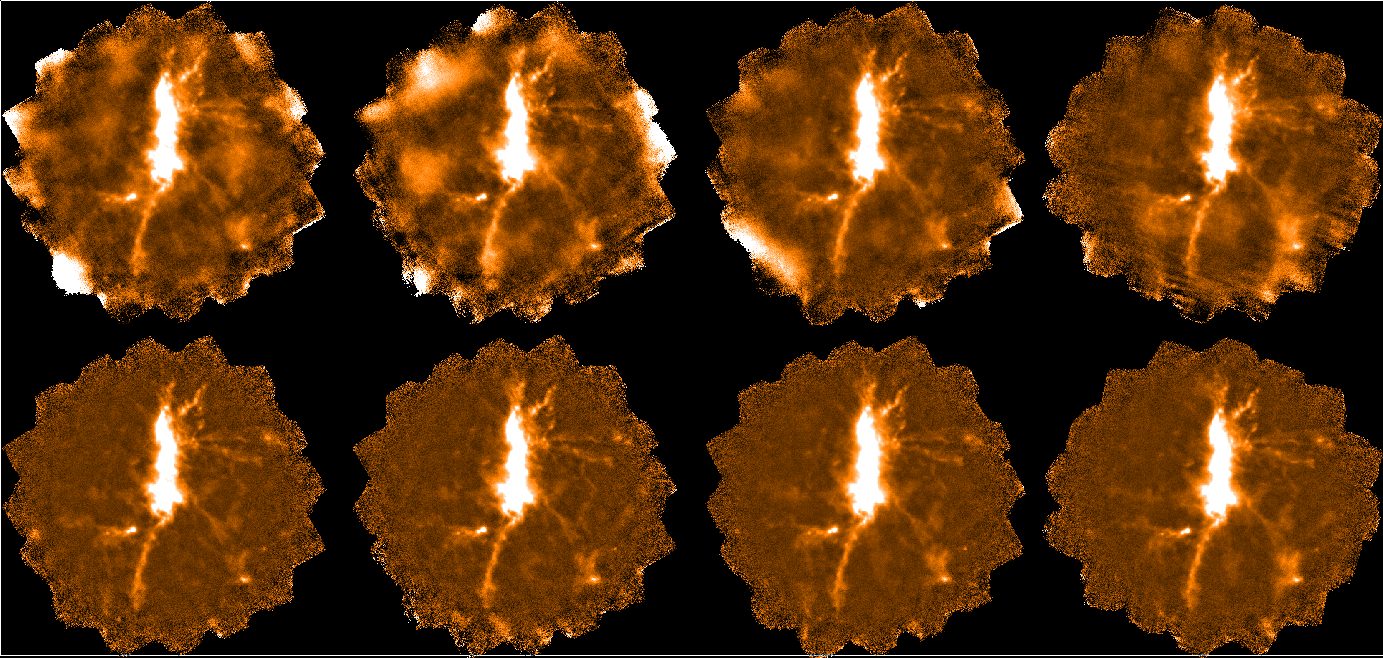
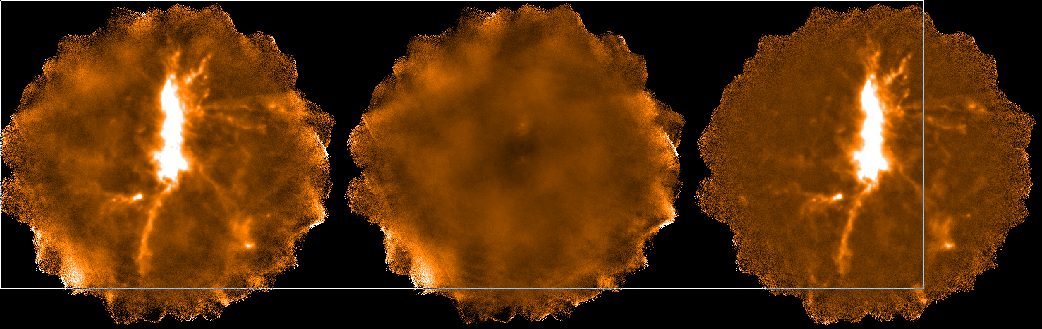
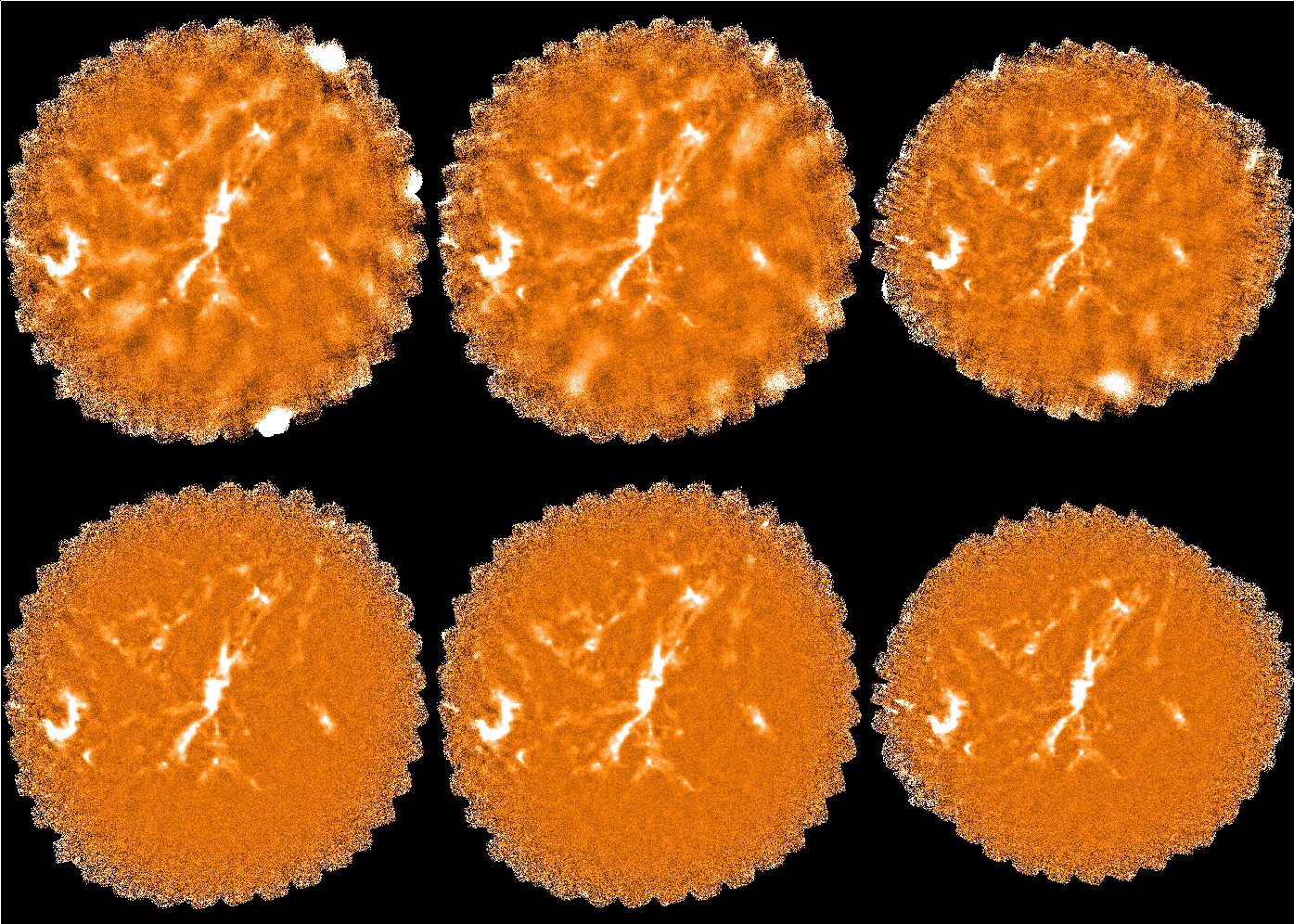
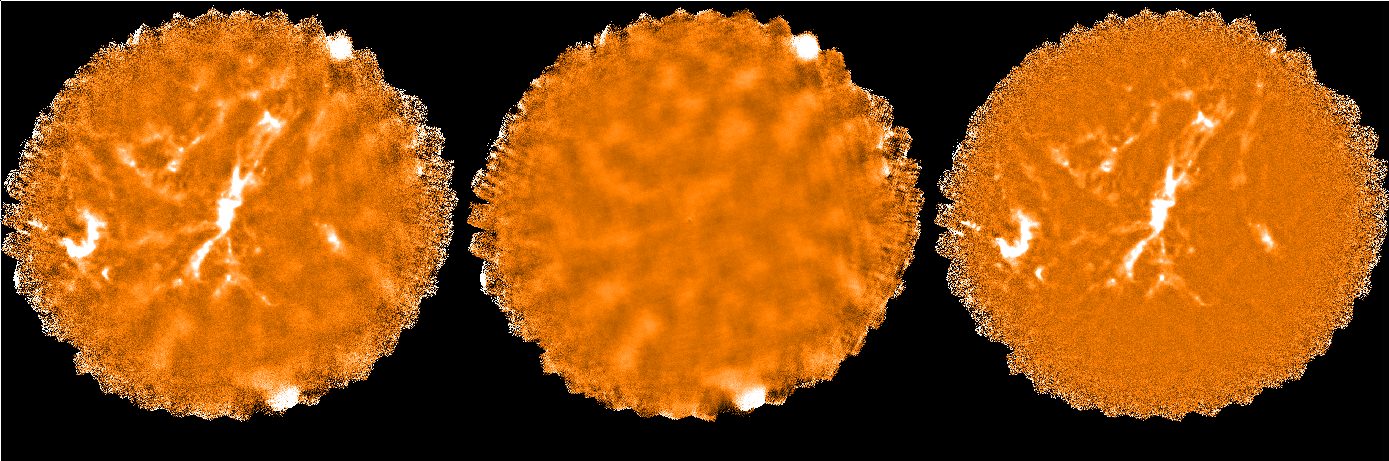
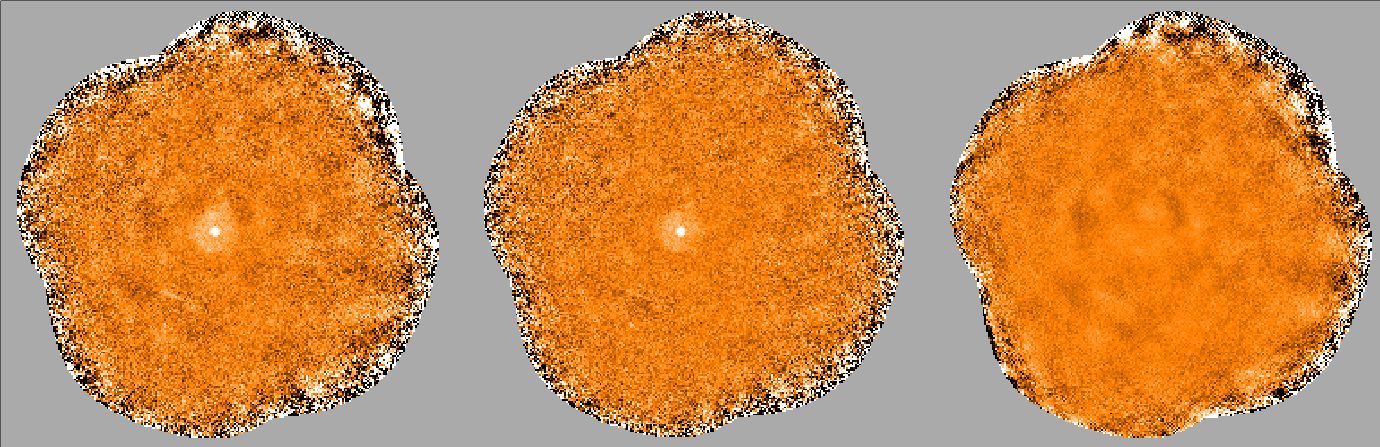
The left map below was made with a default common-mode background (no PCA) and the centre map was made with PCA background removal as shown above. Each observation took about 6 minutes to create without PCA and about 25 minutes with the new faster PCA. The right map shows the difference between the other two maps. All three use the same scaling.